


Nâng cấp AI với FSM từ bài viết trước để:
- Dễ sửa chữa, bảo trì, thêm trạng thái.
- Giảm thời gian xử lý.
Thiết kế State
Class State
Header:
// State.h
//
#ifndef __State_h__
#define __State_h__
class Monkey;
template <class entity_type>
class State {
public:
virtual ~State() {}
//hàm này sẽ được thực hiện khi state được nhập
virtual void Enter(entity_type*) = 0;
//đây là hàm update của state
virtual void Execcute(entity_type*) = 0;
//hàm này sẽ thực hiện khi state đã thoát để chuyển state
virtual void Exit(entity_type*) = 0;
};
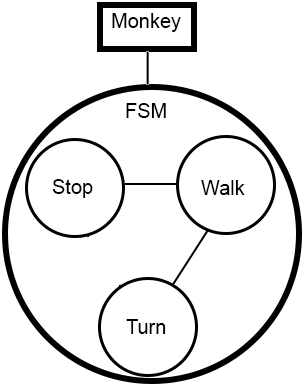
#endif // __State_h__Các trạng thái của Monkey bao gồm stop, walk, và turn sẽ kế thừa từ class State. Với việc thiết kế mỗi trạng thái của AI là 1 class State, việc bảo trì, sữa chữa, hay thêm 1 trạng thái cho AI sẽ tốt hơn rất nhiều vì:
- Các đoạn code của trạng thái không liên quan gì tới các đoạn code của trạng thái khác.
- Dễ dàng tìm đến nơi muốn sửa chữa hay bảo trì.
- Nếu muốn thêm 1 trạng thái cho AI chỉ việc tạo ra 1 trạng thái mới cho AI được kết thừa từ class
State.
Vòng đời của 1 trạng thái của AI là:
- Enter.
- Execcute.
- Exit.
Monkey states
Header
#ifndef __Monkey_State_h__
#define __Monkey_State_h__
#include "State.h"
class Monkey
class Stop: public State<Monkey> {
private:
Stop(){}
Stop(const Stop&);
Stop& operator=(const Stop&);
protected:
public:
static EnterMineAndDigForNugget* Instance();
virtual void Enter(Monkey* _monkey);
virtual void Execute(Monkey* _monkey);
virtual void Exit(Monkey* _monkey);
};
class Walk: public State<Monkey> {
private:
Walk(){}
Walk(const Walk&);
Walk& operator=(const Walk&);
protected:
public:
static Walk* Instance();
virtual void Enter(Monkey* _monkey);
virtual void Execute(Monkey* _monkey);
virtual void Exit(Monkey* _monkey);
};
class Turn: public State<Monkey> {
private:
Turn(){}
Turn(const Turn&);
Turn& operator=(const Turn&);
protected:
public:
static Turn* Instance();
virtual void Enter(Monkey* _monkey);
virtual void Execute(Monkey* _monkey);
virtual void Exit(Monkey* _monkey);
};
#endif // __Monkey_State_h__Source
#include "MonkeyState.h"
#include "State.h"
#include "Monkey.h"
//********************Stop*****************************
Stop* Stop::Instance() {
static Stop instance;
return &instance;
}
void Stop::Enter(Monkey* _monkey) {}
void Stop::Execute(Monkey* _monkey) {
if (_monkey->isStopTimeout())
_monkey->GetFSM()->ChangeState(stWALK::Instance());
}
void Stop::Exit(Monkey* _monkey) {}
//*****************************************************
//*******************Walk******************************
Walk* Walk::Instance() {
static Walk instance;
return &instance;
}
void Walk::Enter(Monkey* _monkey) {}
void Walk::Execute(Monkey* _monkey) {
pMiner->walk();
if (_monkey->isWalkOutBorder())
_monkey->GetFSM()->ChangeState(Turn::Instance());
else if (_monkey->isWalkTimeout())
_monkey->GetFSM()->ChangeState(Stop::Instance());
}
void Walk::Exit(Monkey* _monkey) {}
//*****************************************************
//*********************Turn****************************
Turn* Turn::Instance() {
static Turn instance;
return &instance;
}
void Turn::Enter(Monkey* _monkey) {}
void Turn::Execute(Monkey* _monkey) {
_monkey->turn();
_monkey->GetFSM()->ReVertToPriviousState();
}
void Turn::Exit(Monkey* _monkey) {}
//*****************************************************
State Machine
Bây giờ cần 1 FSM có nhiệm vụ chạy trạng thái hiện tại và chuyển trạng thái của AI.
Header
#ifndef __State_Machine_h__
#define __State_Machine_h__
#include "State.h"
template <class entity_type>
class StateMachine {
public:
StateMachine(entity_type* m_Owner):m_pOwner(m_Owner),
m_pCurrentState(NULL),
m_pPreviousState(NULL),
{}
virtual ~StateMachine(){}
void SetCurrentState(State<entity_type>* _state){m_pCurrentState = _state;}
void SetPreviousState(State<entity_type>* _state){m_pPreviousState = _state;}
void Update() const {
m_pCurrentState->Execute(m_pOwner);
}
void ChangeState(State<entity_type>* _newState) {
m_pPreviousState = m_pCurrentState;
m_pCurrentState->Exit(m_pOwner);
m_pCurrentState = _newState;
m_pCurrentState->Enter(m_pOwner);
}
void RevertToPreviousState() {
ChangeState(m_pPreviousState);
}
State<entity_type>* CurrentState() const{return m_pCurrentState;}
State<entity_type>* PreviousState() const{return m_pPreviousState;}
protected:
private:
entity_type* m_pOwner;
State<entity_type>* m_pCurrentState;
State<entity_type>* m_pPreviousState;
};
#endif // __State_Machine_h__Với class StateMachine ở trên chỉ cần thật sự chú ý những điều sau:
- Trạng thái hiện tại của AI là
m_pCurrentState. - Trạng thái trước đó của AI là
m_pPreviosState.
Monkey
Header
#ifndef __Monkey_h__
#define __Monkey_h__
#include <time.h>
#include "StateMachine.h"
#include "State.h"
#include "MonkeyState.h"
#include "cocos2d.h"
USING_NS_CC;
#define MAX_STOP_TIME 10
#define MAX_WALK_TIME 20
#define MAX_WALK_DIST 100
class Monkey : public Node {
public:
Monkey() {
log("Monkey()");
}
~Monkey() {
delete m_monkeyFSM;
}
CREATE_FUNC(Monkey);
virtual bool init() {
_curPos = 0;
_step = 1;
m_monkeyFSM = new StateMachine<Monkey>(this);
m_monkeyFSM->SetCurrentState(Stop::Instance());
this->scheduleUpdate();
return true;
}
void stop() {
cocos2d::log("stop()");
}
void walk() {
_curPos += _step;
cocos2d::log("walk(): pos=%d", _curPos);
}
void turn() {
_step *= -1;
cocos2d::log("turn(): step=%d", _step);
}
void update(float dt) {
m_monkeyFSM->update();
}
protected:
private:
StateMachine * m_monkeyFSM;
time_t _curTime;
int _curPos;
int _step;
public:
bool isStopTimeout() {
return (time(0) - _curTime > MAX_STOP_TIME);
}
bool isWalkTimeout() {
return (time(0) - _curTime > MAX_WALK_TIME);
}
bool isWalkOutBorder() {
return (_curPos > MAX_WALK_DIST || _curPos < -MAX_WALK_DIST);
}
};
#endif // __Monkey_h__Trong class Monkey lúc này gồm có:
- Monkey FSM: Là FSM dùng để chuyển qua lại giữa các trạng thái
stop,walk,turnvà execcute trạng thái hiện tại củaMonkey. - Các sự kiện và quy luật.
Tham khảo
- https://www.cocos2d-x.org
- https://www.en.wikipedia.org